

















近年来,随着计算机视觉和机器学习等相关技术的持续演进,智能巡检机器人的性能和功能得以大幅提升,其应用场景日益多样化,市场需求也随之呈现强劲增长态势。
如今,在电力行业,智能巡检机器人凭借高效稳定的巡检方式,可以在配电室、动力机房等电力环境履行巡检任务,及时发现设备的异常现象并自动报警,对于提升运维工作的效率和安全性有着重要意义。

| 机械臂巡检机器人需求场景
在日常配电巡检工作中,电气工程师们会对配电柜等设施设备进行检查,并根据实际需要进行电流电压按键查看、分闸操作、合闸操作等动作。其中部分操作危险性高,极容易因为操作不当导致安全事故发生。
以高压配电柜的分合闸操作为例,目前高压配电柜的分合闸操作需要专门的操作票,且必须两人为一组,一人负责操作,另外一人负责安全监督,以便特殊情况下能够快速处理事故。由此可见,如果能通过带有机械臂的机器人完成类似危险操作,将极大的减少安全事故的发生,保障电气工程师的人身安全。

| 机械臂技术趋势
机械臂是一种能够模拟人类手臂运动的机器,广泛应用于工业、医疗和科研领域。20世纪初,随着计算机技术的快速发展,六轴机械臂的概念首次被提出。但由于当时计算机运算能力有限,控制算法相对简单以及硬件条件的限制,六轴机械臂的运动速度和精度都较低。
到了21世纪,随着控制算法和传感器技术日趋成熟,以及轻量化材料的应用,机械臂的智能化水平和硬件水平得到了显著提高,而能够在六个独立的方向上进行活动、具有较强的适应性的六轴机械臂也逐渐成为现代工业自动化和机器人技术中的重要组成部分,帮助人工实现更加精准的定位和操作。

| 蒙帕六轴机械臂智能巡检机器人
结合机械臂相关技术原理研究和多样化实际巡检场景需求,蒙帕从硬件和算法两个先决条件出发,打造拥有六轴机械臂的智能巡检机器人专业版,代替运维人员准确、高效地完成部分巡检操作。

- 硬件条件
蒙帕通过增加激光传感器、3D深度相机、柔性夹爪等硬件,配合人工智能、视觉识别等技术,使机械臂可以实现自主感知和决策,不断提升智能化水平,从而提高工作效率和安全性。
- 算法条件
蒙帕基于运动学正解和逆解的计算,以及逆运动学的数值解法,根据操作目标的形态、位置等因素,自动计算机械臂的伸缩方向,并反推各关节所需转换的角度,规划机械臂关节空间的运动轨迹,从而级联构成末端位姿,自动完成机械臂姿态的切换,再结合末端控制盒和夹爪,实现机械臂的精准控制和操作。
经过理论探究与实际测试,蒙帕智能巡检机器人专业版已应用于某大型制造业客户现场,进行多功能仪表翻页操作(图1)和空气开关拨动操作(图2)

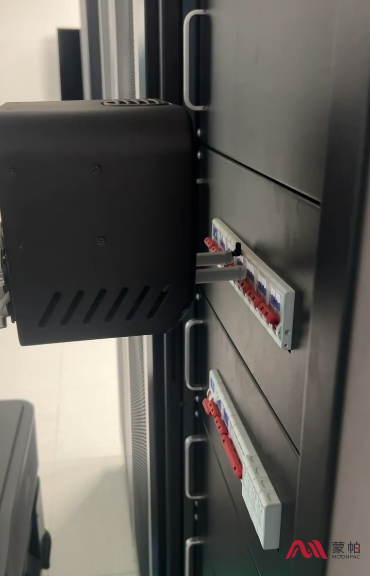
图2 图1
目前,蒙帕智能巡检机器人专业版能够通过搭载的六轴机械臂完成分合闸按钮的按压操作、空气开关断开/闭合操作、多功能仪表自动翻页操作及自主开关机柜门操作,并将在之后的优化过程中逐步适配更多操作组件。

伴随着机械臂感知智能化、算法多样化、硬件轻简化的趋势,六轴机械臂巡检机器人在提高巡检效率、增强工作安全、推动技术创新等方面将发挥重要作用。
未来,蒙帕智能巡检机器人专业版也将持续迭代升级,作为运维人员的“左膀右臂”赋能各个领域,助力运维工作朝着更智能、更安全、更高效的方向迈进。


电话: 400-166-0296
邮箱: contact@moonpac.com
地址: 上海市闵行区申长路990弄
虹桥汇 T6-805