

















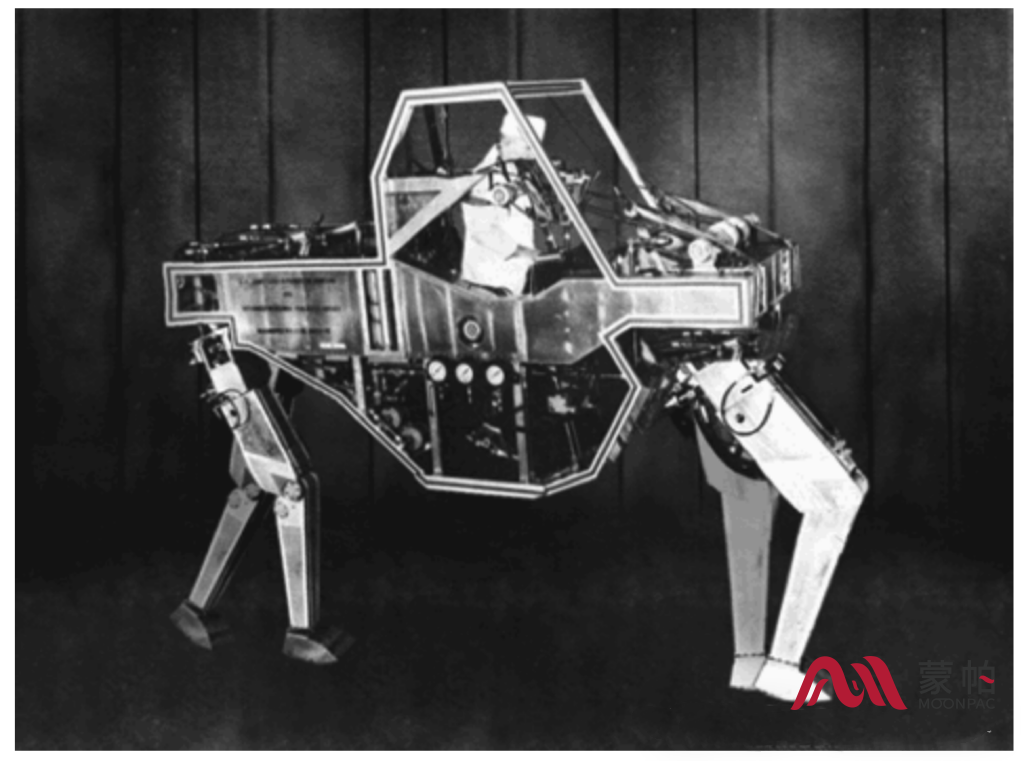
上世纪60年代,世界上第一台四足机器人Walking Truck诞生时,操作者需要通过复杂的力反馈系统控制它移动,操作费力且效率低下,却是机器人迈出仿生第一步的里程碑。
今天,现代四足机器人不仅能够灵活地穿越复杂地形,还正经历前所未有的形态演变,从最初的机械仿生到如今的硬件叠、轮足融合、全轮式演进,四足机器人正不断突破传统框架,悄然重塑着移动机器人的能力边界。 四足机器人形态演变的逻辑
机器人形态的演变本质上是对环境适应性和功能扩展性的追求。四足机器人的发展随着史经历了从静态稳定步行到特定环境中的动态稳定步行,再到非结构化环境下实用动态步行的漫长发展。通过控制系统、机械系统、环境之间的相互作用,机器人获得了更好的稳定性和适应性。 然而,足式结构虽然地形适应性强,但面对日益多元化的应用场景和使用需求,四足机器人的效率、稳定性与功能性又成为瓶颈。 这些矛盾推动着设计师不断探索新的形态解决方案,如:给机器人增加定制化硬件提升操作能力;给四足装上轮子提升复杂环境适应力;或者为特定场景定制纯轮形态,提升续航及稳定性。 每一次形态的改变,都是为了让机器人更好地融入使用场景,去完成那些曾经对机器人来说不可能完成任务。
四足机器人的三大演变方向
1 硬件功能叠加:从移动到操作
四足机器人最直接的形态演变是在基础四足结构上进行功能扩展。通过在机器人背部或腹部加装机械臂、传感器模块或专用工具,机器人能够在到达指定地点后执行具体操作任务。 Tips 适用场景:工业巡检、山地救援等 传统四足机器人在工业领域找到了最具潜力的应用空间,如搭载智能传感器和机械臂的四足机器人能够进入地下管廊等危险环境,代替或辅助人工完成检测任务。
2 轮足融合设计:速度与适应的平衡
轮足式机器人将腿式和轮式结构结合于一身,在平坦地面上,机器人可以利用轮式结构快速移动;遇到楼梯或崎岖地形时,能切换为足式步态,提高机器人的作业能力。 Tips 适用场景:未有实际落地场景 随着技术成熟可能适用于室内外转换的场景,如厂区物流配送、园区安防巡逻等
3 专用轮式形态:特定场景的深度优化
对四足机器人而言,单纯的硬件叠加或轮足融合可能会面临机械结构复杂、维护成本高、速度与稳定性及续航时长无法平衡的情况。 因此面对结构化环境,专用轮式机器人能够提供最大的效率和稳定性,并可根据不同的任务需求搭载多种传感器及机械臂,满足多元需求。 Tips 机房/配电室巡检、送餐、导览等 在数据中心、办公楼宇、医院等结构化环境中,轮式机器人能够完美适应密集机柜过道、走廊宽度、电梯尺寸等空间限制,以更低维护成本、更长续航、更高稳定性及效率提供服务。

多形态机器人的无限可能
无论是纯四足机器人,还是轮足融合、专用轮式机器人,随着材料科学、人工智能和新兴技术的进步,都会在未来让我们有机会看到更多突破想象的科技创新: 1 仿生设计持续深化 通过优化机器人构造、比例和材料特性,不断提升机器人的运动性能。
2 场景化模块设计 未来的不同形态机器人可采用可重构设计,根据实际任务场景快速更换不同模块。同一个机器人底盘可以轻松在轮式、足式或轮足混合形态间转换,实现一机多用。
3 AI算法深度融合 机器人的发展对感知系统和控制算法都有着较高要求。未来,通过与AI先进算法的更深结合,机器人能够更快速适应形态/场景变化,在动态环境中保持高效稳定。
从四足仿生到硬件叠加、轮足融合、纯轮式应用,机器人形态的演变始终围绕场景适配与能力提升展开。随着技术突破,不同形态的机器人将更深入地融入人类生产生活,成为智能时代的高效基础设施。


电话: 400-166-0296
邮箱: contact@moonpac.com
地址: 上海市闵行区申长路990弄
虹桥汇 T6-805