
400-166-0296
















400-166-0296
400-166-0296

新 闻
蒙帕视角丨二维码辅助回桩之二维码重定位
.
|
蒙帕Moonpac
|
日期:2025-08-25
|
271 次浏览
|
🔊 点击朗读正文
❚❚
▶
|
分享到:
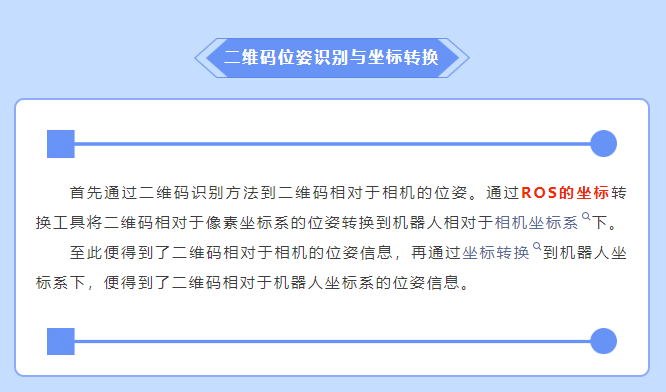
过二维码识别方法到二维码相对于相机的位姿。通过ROS的坐标转换工具将二维码相对于像素坐标系的位姿转换到机器人相对于相机坐标系下。
至此便得到了二维码相对于相机的位姿信息,再通过坐标转换到机器人坐标系下,便得到了二维码相对于机器人坐标系的位姿信息。
至此便得到了二维码相对于相机的位姿信息,再通过坐标转换到机器人坐标系下,便得到了二维码相对于机器人坐标系的位姿信息。
————————————————————————————————————————————————————————————————————————————————————

.

.
电话: 400-166-0296
邮箱: contact@moonpac.com
地址: 上海市闵行区申长路990弄
虹桥汇 T6-805
机器人产品
联系我们
智能运维服务
关于蒙帕